CGBoxの一部の記事にはアフィリエイト広告が含まれております。
【Blender2.9】IK・FKとは?Part.1「下半身のリギングを行おう!」
こんにちは!
モデリングを勉強中のHyoketsuです。
今回はリギングの中でも、発展的な制御方法になるコンストレイトを用いる方法を紹介します。
IKやFKなどの仕組みやレイヤー分け、ペアレント関係など複雑な機能を理解していきましょう!
▼【コンストレイトの基礎】はコチラ!
CGbox

【Blender3.0】コンストレイントでアニメーション作業を効率化!! | CGbox
こんにちは! 皆さんはBlenderでアニメーションを作っていますか? たいてい、モデルには多くのボーンがあり、それを一つ一つ制御するのは非常に大変です。 そのため、リギ...
リギングの基礎的な記事もいくつかアップしているので、そちらも活用してみてください。
▼【リギングの方法】はコチラ!
CGbox
【Blender2.9】リギングの方法:まずはここから基礎編! | CGbox
こんにちは! Blenderでの3DCG制作を勉強中のUEDAです。 Blenderを勉強して、アウトプットの場としてそれぞれの機能をまとめられればと思っています。参考にもなれば嬉しい...
ペンギンをモデルにしてボーンの追加方法や対称化をまとめています!
▼【Rigifyで簡単にリギング】はコチラ!
CGbox
【Blender2.9】Rigify:アーマチュアを瞬時に追加 | CGbox
こんにちは! Blenderでの3DCG制作を勉強中のUEDAです。 Blenderを勉強して、アウトプットの場としてそれぞれの機能をまとめられればと思っています。参考にもなれば嬉しい...
人型の場合に簡単にリギングを行うことができます。
オートの為、思ったように動かなかったり修正が必要になる場合があるでしょう。
▼【全身モデルを作成】はコチラ!
CGbox

【Blender2.9】全身モデルを作ってみよう 頭部編I「顔パーツの当たりを作る」 | CGbox
こんにちは! Hyoketsuです。今回はBlenderを用いて一人のモデルを作っていくまでの過程を紹介します。 また、その際に便利な機能や工程を紹介していきたいと思います。 男...
CGbox
【Blender2.9】全身モデルを作ってみよう 頭部編II 「頭部をメッシュで埋めるトポロジー」 | CGbox
こんにちは! Hyoketsuです。 前回に引き続き、Blenderを用いて一人のモデルを作っていくまでの過程を紹介します。 ▼Part.1はこちらから! https://vtuberkaibougaku.site/...
CGbox
【Blender2.9】全身モデルを作ってみよう 上半身編「胸を基準にしたトポロジーの形成」 | CGbox
こんにちは! Hyoketsuです。 今回は前回に引き続き全身モデルを作っていこうと思います。 全身ボディは顔面に比べると注視される事は少ないため、人によっては細かく作り...
目次
IK・FKとは?
IKとFKは、インバースキネマティクスとフォワードキネマティクスの略称ですが、今後覚えていても覚えていなくても構わないので上書きして覚えましょう。
- IK・・・いい感じに曲がる関節
- FK・・・ふつうに曲がる関節
どちらもアニメーションを付ける際に覚えておくと良い機能です。
- 関節を動かす際に、きまった場所に足先を動かしたい(行き先が決まっている)
・・・いい感じの関節をまげたい - 関節を動かす際に、腕を振るように振り回したいから一点のみの関節を動かしたい(行き先はそこまで優先してない)
・・・ふつうに関節をまげたい
体の部位によってはIKとFKを駆使して人間味のある関節を再現する必要があります。
この記事ではRigifyを用いずに下半身のリギングを行っていきます。
実際にリギングを行っていく①
自作のこのモデルを使用して下半身のリギングをしていきます。
大まかな概要としては
- 左半身のアーマチュアを用意する
- 部位ごとのIK・FKを組み込んでいく
- 対称化を適用する
- ボーンにウェイトを乗せていく
実際は2番のIK・FKの仕組みを組み込んでいく点やウェイトを乗せていくパートに非常に時間が割かれたり、全身のリギングを終えてから対称化したりと、間違えると面倒くさいトラブルになるかと思います。
一つ一つクリアしていきましょう。
アーマチュアを追加する
アーマチュアの詳細な設定や操作方法はこちらをチェックしてみてください!
▼リギングの方法:まずはここから基礎編!
CGbox
【Blender2.9】リギングの方法:まずはここから基礎編! | CGbox
こんにちは! Blenderでの3DCG制作を勉強中のUEDAです。 Blenderを勉強して、アウトプットの場としてそれぞれの機能をまとめられればと思っています。参考にもなれば嬉しい...
IK・FKを組み込んだ後に対称化するため、まずは左半身のみにボーンを用意しました。
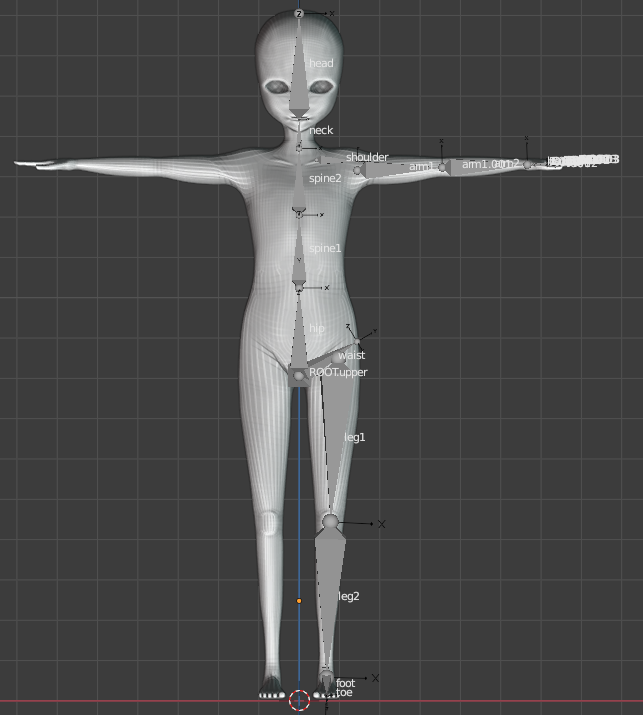
ROOTというキャラクターが向いている方向を定めるボーンとROOT.upperという体の重心・腰の位置と角度を指定するボーンをあらかじめ加えています。
ROOTを動かすとすべてのボーンが動きます。
ROOT.upperを動かすとこの様な挙動をします。
ちなみに、アーマチュアを用意しただけではボディは連動しません。
のちほどウェイトを乗せることでアーマチュアの動きに合わせて変化しますが、すべてのボーンを作り終えた後にしましょう。
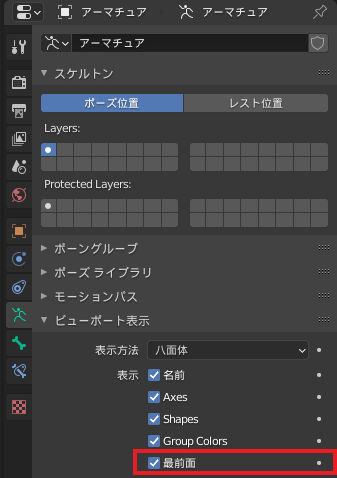
最前面にチェックをいれていますが、それでもIK・FKを組み込む場合に操作がしにくくなる場合があるので私はボディを非表示にします。
実際にリギングを行っていく②
下半身の動きは複雑なため、指定する動きごとにIKやFKを割り当てしていきます。
①IKを追加し、足先の位置で腿(もも)と脹脛(ふくらはぎ)を制御する
この様な動きになります。
と脹脛(ふくらはぎ)を制御する.gif)
現在、アーマチュアを設定した状態でふくらはぎを動かすと、足元はついてきます。
しかし、足元を動かしてもふくらはぎは動きません。
IKを組み込み、足元を動かすことでもも・ふくらはぎが動くようにしましょう。
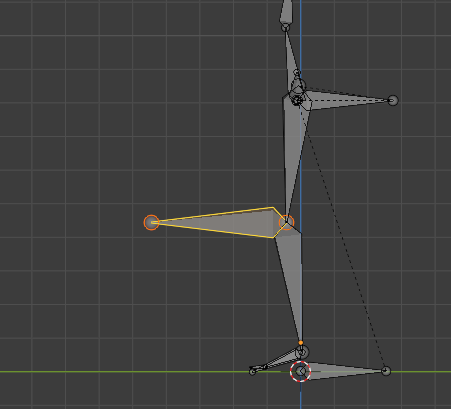
足の位置や角度を指定するため、アーマチュアを追加します。
(編集モード)足の甲と同じ配置に制御用ボーンを配置する
足首から「E」で延長させて同様なボーンを用意します。
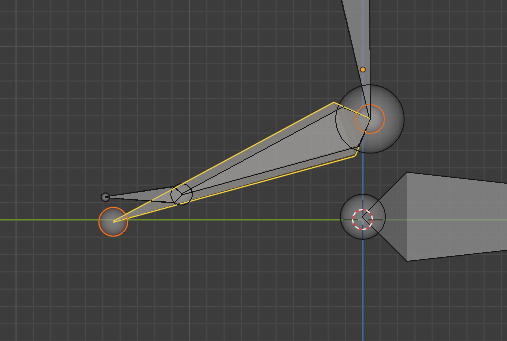
この状態では足首から延長しただけのボーンで、制御元はふくらはぎのボーンになっています。
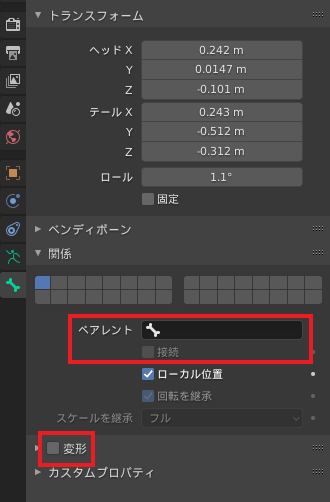
・ペアレント
・接続
・変形
の三点を解除しましょう。
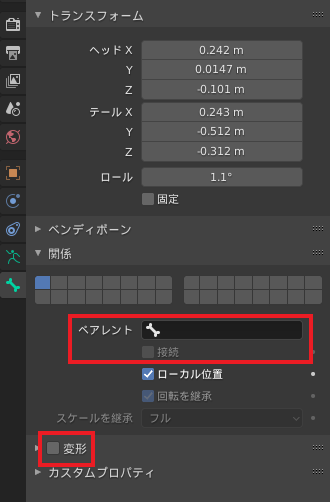
また、後程このボーンを制御用として認識するために、名前を決めます。
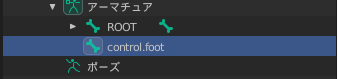
IKをコントロールするために、「control.foot」となずけました。
これにより、足元のボーンと同じ位置にあるものの、どのボーンとも関りがない制御用のボーンができました。
- 制御用ボーンを追加する
- すべての接続を解除する
- 変形を解除する
(ポーズモード)IKを追加し、ターゲットを設定する
今度は先ほど作ったボーンにより、ふくらはぎ・ももが制御されるように設定します。
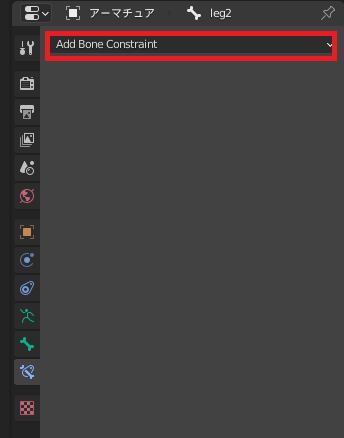
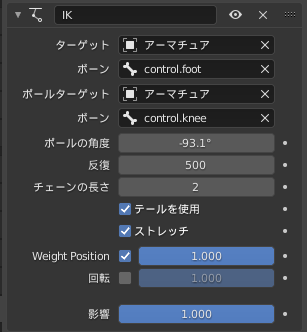
ふくらはぎを選択し、コンストレイントからIKを追加します。
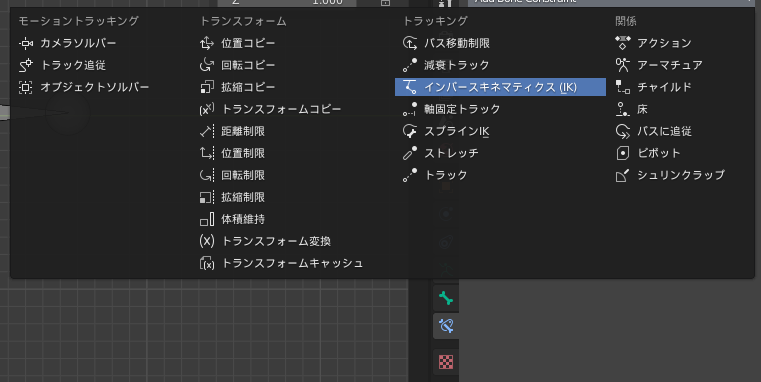
ちなみに複数個の関節を制御する場合、一番末端にIKを設定することになります。
ターゲットを「アーマチュア」にすることで、ボーンを選択できます。
先ほど用意した、「control.foot」を選択します。
チェーンの長さは制御したいボーンの数のため、ふくらはぎ・ふとももの2つ分で、「2」にします。
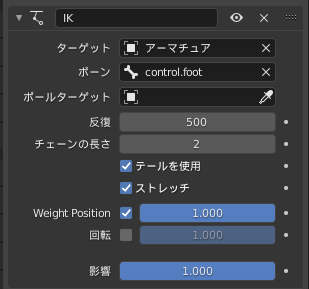
これにより、control.footを動かすとその位置に合わせて足全体が動くようになりました。
- IKを設定したいボーンの末端にコンストレイトを追加する
- IKのターゲットに用意した制御用ボーンを指定する
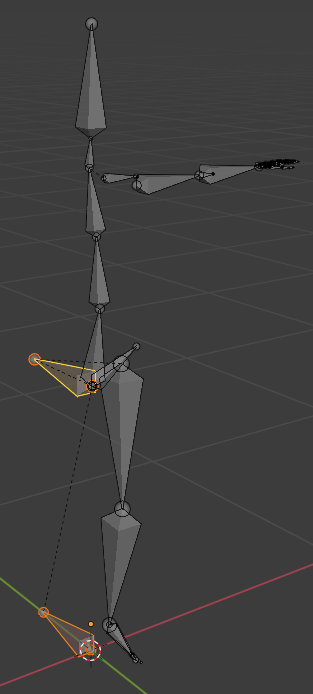
②IKに膝が自然に動くようなポールを設定する
先ほどの状態のままでは「control.foot」の位置を元に自在に動いてしまう為、この様な人間では不可能な体制・膝になってしまいます。
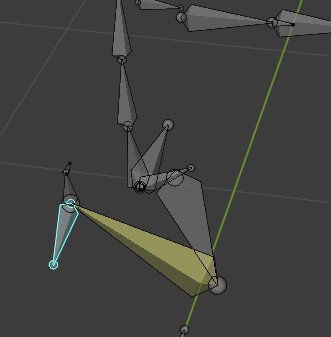
そこで膝の位置や向きをコントロールするIKを組み込みましょう。
(編集モード)膝の高さに制御用ボーンを配置する
先ほどと同様に、膝から「E」で延長させて同様なボーンを用意します。
こちらも制御用のボーンの為、
・ペアレント
・接続
・変形
の三点を解除しましょう。
膝と同じ高さにしますが、ひざ元にある必要はないため、離します。
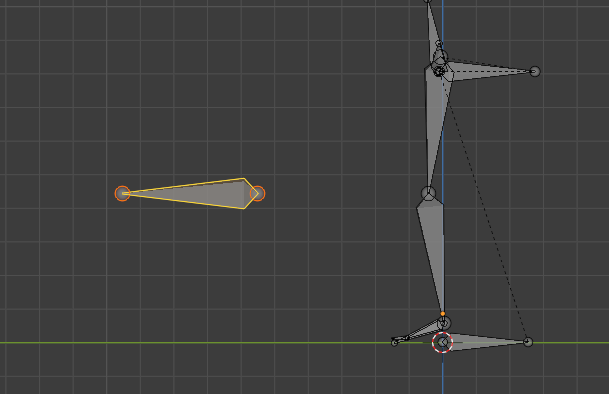
制御用とするために、名前を決めます。

「control.knee」となずけました。
- 制御用ボーンを追加する
- すべての接続を解除する
- 変形を解除する
(ポーズモード)ふくらはぎのIKにポーンを設定する
ふくらはぎのコンストレイトから、ポーンターゲットを「アーマチュア」にすることでボーンを選択できます。
先ほど用意した、「control.knee」を選択します。
この時「control.foot」の位置が変わってしまった場合、ポーンの角度から修正しましょう。
これにより、「control.foot」の位置で違和感が生じても、「control.knee」を動かすことで制御できるようになりました。
- IKのポーンターゲットに用意した制御用ボーンを指定する
まとめ
直感的に動かせばよいFKに比べると、制御ボーンを追加・コンストレイトからIKを追加・ターゲットやポーンを選択など、必要な手順が多く理解しにくいでしょう。
しかし、一度作ってみることでパズルを組み立てるかのようにイメージできるかと思います。
よくあるつまずきで、「変形」のチェックの外し忘れや「ペアレント」の解除し忘れなど最初は気づきにくいトラブルも発生しやすいため落ち着いて原因を探っていきましょう!
次回はIKとペアレント関係をより深くご紹介します。
CGbox
【Blender2.9】IK・FKとは?Part.2「足元のリギングをしよう!」 | CGbox
こんにちは! モデリングを勉強中のHyoketsuです。 コンストレイトの中からトランスフォームや、IKを用いる際のペアレント関係を学びながら下半身のリギングを完成させてい...