CGBoxの一部の記事にはアフィリエイト広告が含まれております。
【Blender2.9】IK・FKとは?Part.2「足元のリギングをしよう!」
こんにちは!
モデリングを勉強中のHyoketsuです。
コンストレイトの中からトランスフォームや、IKを用いる際のペアレント関係を学びながら下半身のリギングを完成させていきましょう。
▼Part1はこちらから!
CGbox

【Blender2.9】IK・FKとは?Part.1「下半身のリギングを行おう!」 | CGbox
こんにちは! モデリングを勉強中のHyoketsuです。 今回はリギングの中でも、発展的な制御方法になるコンストレイトを用いる方法を紹介します。 IKやFKなどの仕組みやレイ...
▼リギングについてはこちらで紹介しています!
CGbox
【Blender2.9】リギングの方法:まずはここから基礎編! | CGbox
こんにちは! Blenderでの3DCG制作を勉強中のUEDAです。 Blenderを勉強して、アウトプットの場としてそれぞれの機能をまとめられればと思っています。参考にもなれば嬉しい...
ペンギンをモデルにしてボーンの追加方法や対称化をまとめています!
▼Rigifyを用いて簡単にIKとFKを追加する方法はこちらから!
CGbox
【Blender2.9】Rigify:アーマチュアを瞬時に追加 | CGbox
こんにちは! Blenderでの3DCG制作を勉強中のUEDAです。 Blenderを勉強して、アウトプットの場としてそれぞれの機能をまとめられればと思っています。参考にもなれば嬉しい...
人型の場合に簡単にリギングを行うことができます。
オートの為、思ったように動かなかったり修正が必要になる場合があるでしょう。
目次
IK・FKとは?
IKとFKは、インバースキネマティクスとフォワードキネマティクスの略称ですが、今後覚えていても覚えていなくても構わないので上書きして覚えましょう。
- IK・・・いい感じに曲がる関節
- FK・・・ふつうに曲がる関節
どちらもアニメーションを付ける際に覚えておくと良い機能です。
実際にリギングを行っていく③
前回はIKで屈伸運動を再現しました。
③回転コピーで、足首の回転を制御する
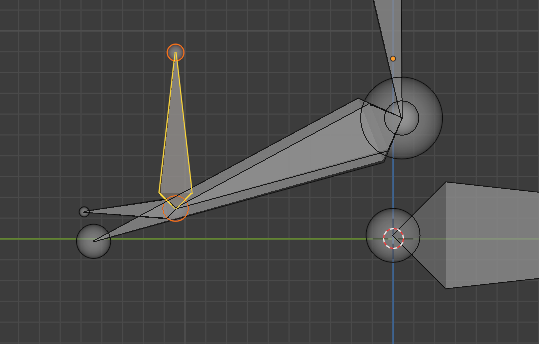
現在「control.foot」で足首の位置は指定できますが角度は指定できていません。
角度を調整する場合、足の甲部分の変形ボーンを変えることで変更できますが、「control.foot」ひとつで位置と角度を変更できるようにしましょう。
この様な動きを再現します。
(ポーズモード)回転コピーを追加し、ターゲットを設定する
「control.foot」一つで位置と回転を再現するため、回転を同期させてあげる必要があります。
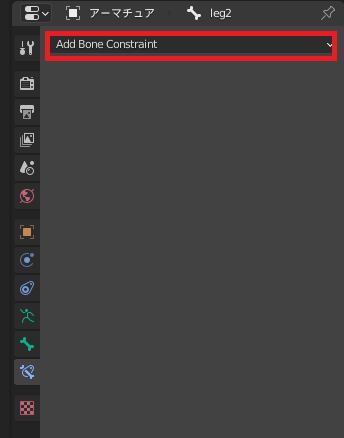
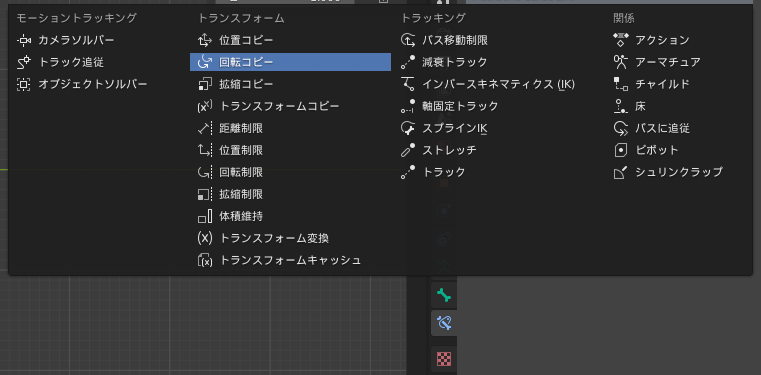
動かす制御ボーンがターゲットなので、合わせて動いて欲しいボーンに回転コピーを追加します。
ターゲットを「アーマチュア」にすることで、ボーンを選択できます。
先ほど用意した、「control.foot」を選択します。
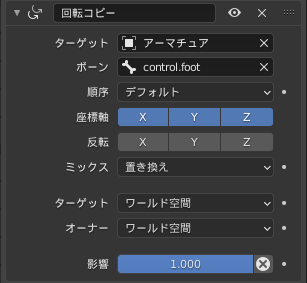
これにより、control.footを回転させると足首が回転するようになりました。
回転コピーを追加し、ターゲットを設定する.gif)
- 動いて欲しいボーンに回転コピーを追加する
- 回転コピーのターゲットに制御用ボーンを指定する
④ペアレント関係を指定し、つま先中心に足首を制御する
足首をねじる動きを再現する際、ボーンを複数回動かす必要があります。
この様に一つのボーンで制御できるようにしましょう。
つま先立ちなど、つま先が軸になる姿勢の為の制御ボーンにもなります。
(編集モード)つま先に制御用ボーンを配置する
つま先から「E」で延長させて同様なボーンを用意します。
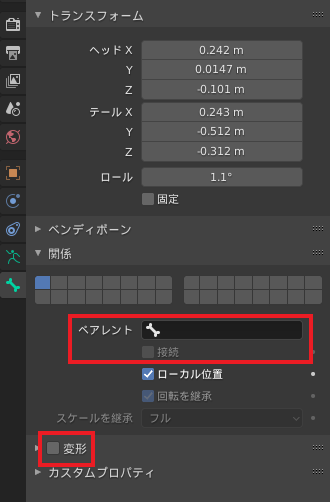
こちらは制御用のボーンの為、
・ペアレント
・接続
・変形
の三点を解除しましょう。
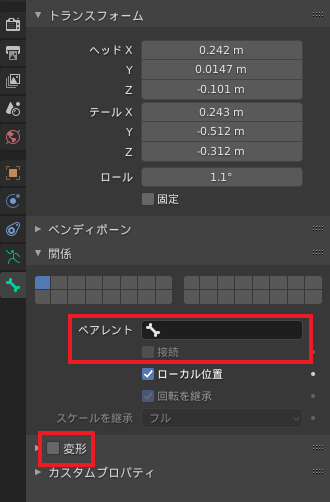
制御用とするために、名前を決めます。
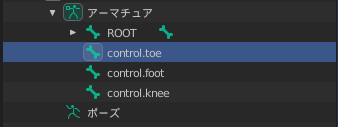
「control.toe」となずけました。
- 制御用ボーンを追加する
- すべての接続を解除する
- 変形を解除する
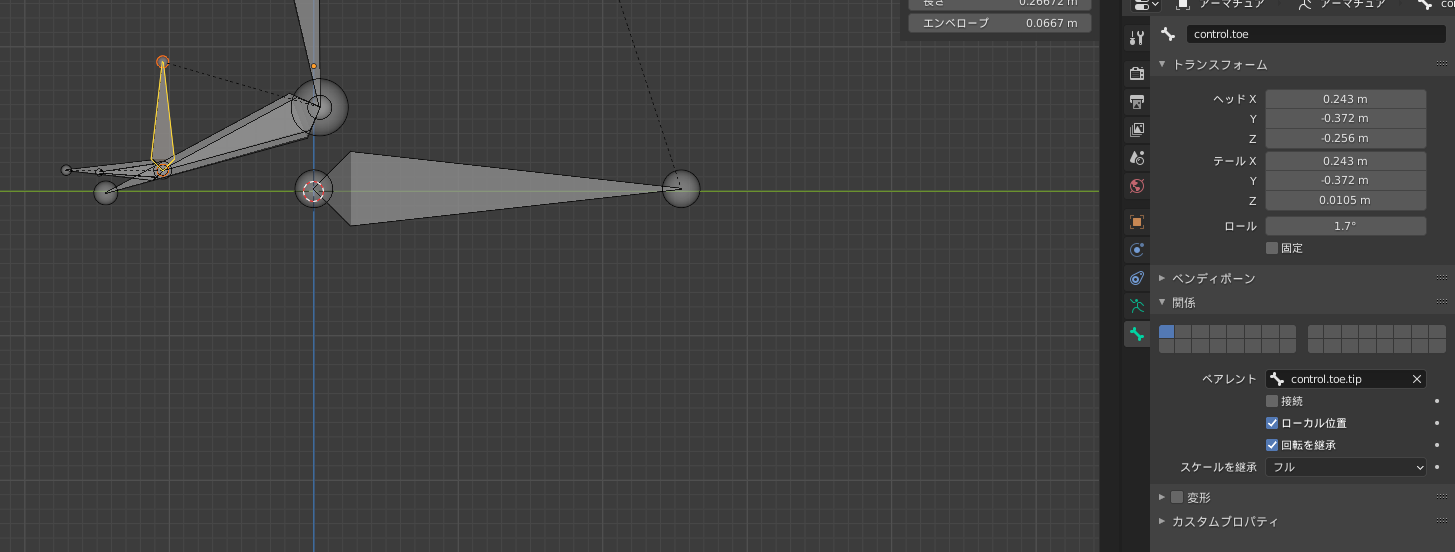
(編集モード)ペアレント関係を追加し、動きを連携させる
現在足の甲の制御用として「control.foot」が存在して言います。
「control.foot」が「control.toe」を軸にして回転をするという動きをしてほしいため、「control.foot」のペアレントに「control.toe」を設定します。
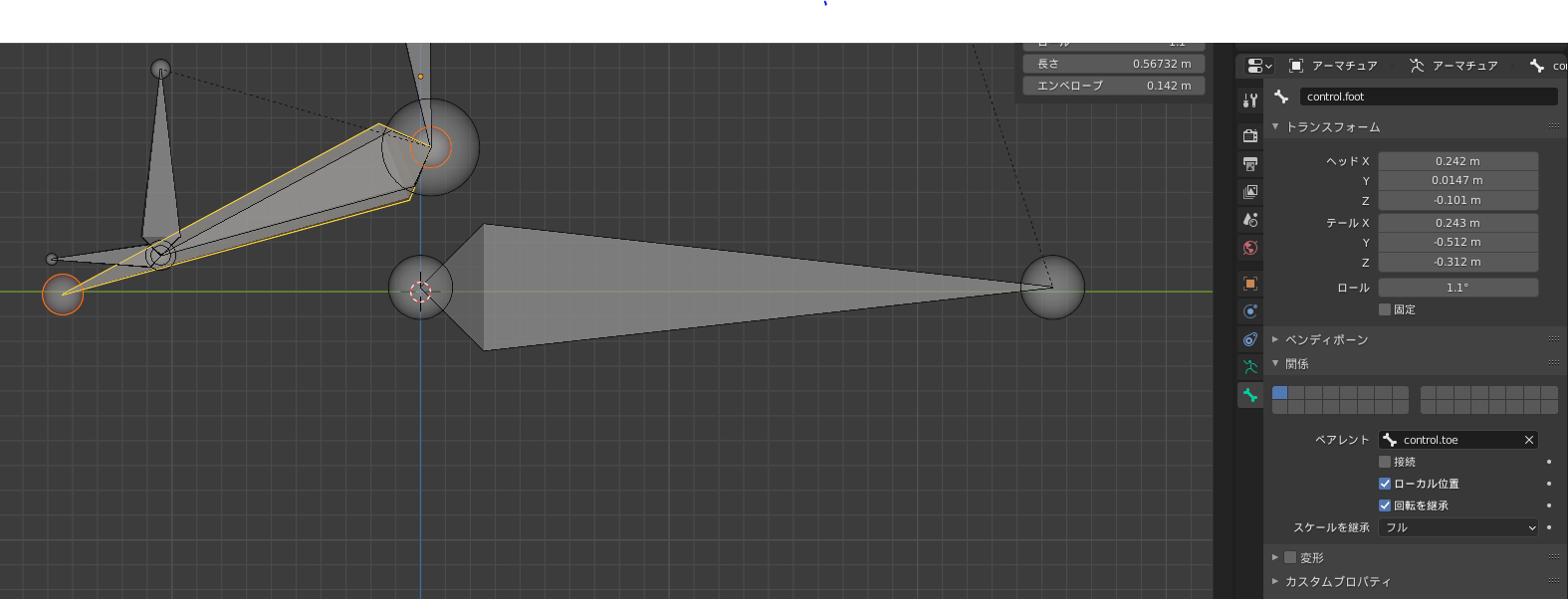
「control.toe」を回転させるだけで、つま先を軸とした足首の位置移動、それによる「control.foot」のIK処理でふくらはぎ・ももの制御ができるようになりました。
ペアレント関係を追加し、動きを連携させる.gif)
- 動いて欲しいボーンの親を設定する
⑤回転コピーを追加し、つま先が地面にめり込まないように制御する
つま先立ちを再現する際、「control.toe」を制御することで大まかな動きはできます。
しかし、足の付け根が軸になっているため、地面にめり込んでしまいます。
この様に制御できるようにしましょう。
(編集モード)つま先に制御用ボーンを配置する
つま先から「E」で延長させて同様なボーンを用意します。
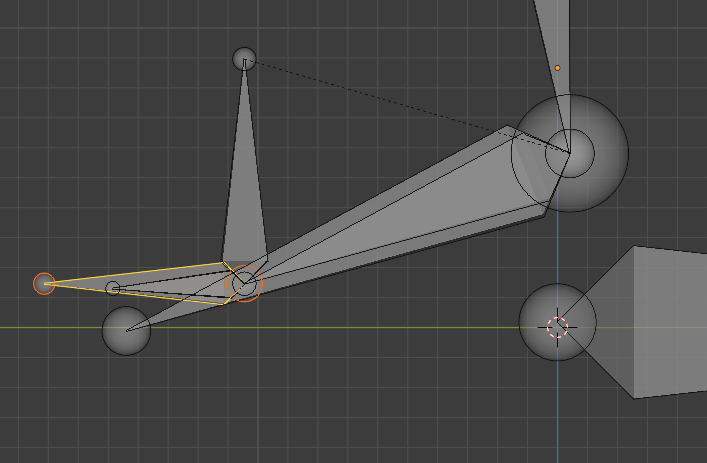
この状態では足首から延長しただけのボーンで、制御元はふくらはぎのボーンになっています。
・ペアレント
・接続
・変形
の三点を解除しましょう。
制御用とするために、名前を決めます。
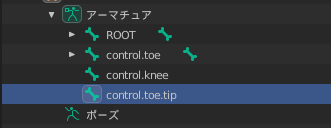
「control.toe.tip」となずけました。
- 制御用ボーンを追加する
- すべての接続を解除する
- 変形を解除する
(ポーズモード)回転コピーを追加し、ターゲットを設定する
「toe」に回転コピーを追加します。
ターゲットを「アーマチュア」にすることで、ボーンを選択できます。
「control.toe.tip」を選択します。
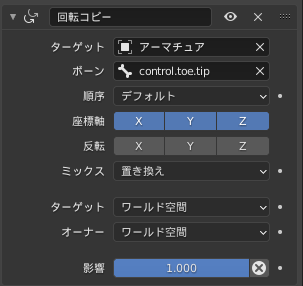
これにより、control.toeを回転させてもつま先が地面にめりこまなくなります。
また「control.toe.tip」を動かすことで足全体の位置を制御できるようにするために、ペアレント関係を追加します。
(編集モード)ペアレント関係を追加し、動きを連携させる
「control.toe.tip」でつま先を軸とした足全体の位置移動、「control.toe」で足の付け根軸の動きを再現できるようにしていきましょう。
つま先で位置の足の位置の移動
付け根でつま先立ちの再現
など動きがさいげんできるようになりましたが、現在ペアレントの最上位がつま先になっています。
そのため足首を軸にした動きをした場合、この様な状態でボーンがついてきません。
また、つま先を動かす場合は付け根が軸になる動きしかできない状況です。
そのため、足首を親にする制御ボーンを追加しましょう。
⑥ペアレント関係を指定し、かかと中心に足先を制御する
足首をねじる動きを再現する際、ボーンを複数回動かす必要があります。
この様に一つのボーンで制御できるようにしましょう。
足先の制御ボーンすべての親に指定しましょう。
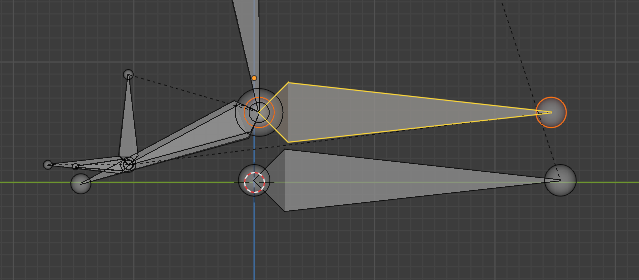
(編集モード)かかとに制御用ボーンを配置する
かかと付近から「E」で延長させて同様なボーンを用意します。
こちらは制御用のボーンの為、
・ペアレント
・接続
・変形
の三点を解除しましょう。
制御用とするために、名前を決めます。
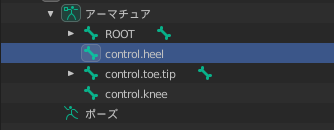
「control.heal」となずけました。
- 制御用ボーンを追加する
- すべての接続を解除する
- 変形を解除する
(編集モード)ペアレント関係を追加し、動きを連携させる
「control.heal」で足首から先の制御ボーンを制御できるようにしていきましょう。
現在、足先の制御ボーンの最上位は「control.toe.tip」になっています。
「control.toe.tip」を選択して、「control.heel」をペアレントにしましょう。
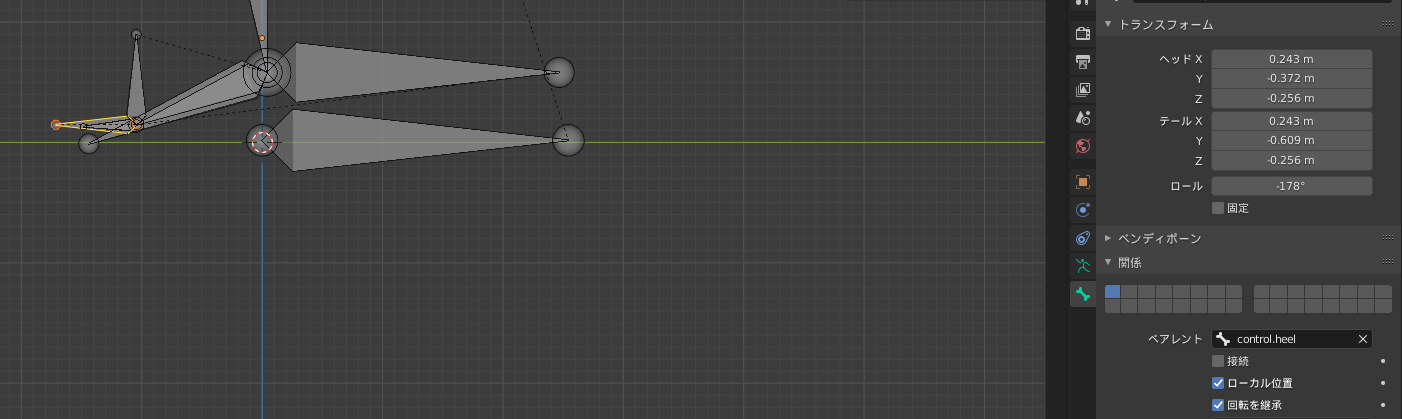
これにより足先全部を、かかとの制御ボーンでひとまとめに動かすことができます。
まとめ
アーマチュアは人間の骨のように組み込んだり、関節の制御のように組み込んだりと組み合わせ次第で人間らしいリギングを行うことができます。
IKを全てに組み込むのではなく、ペアレント関係を組み込んだり、回転コピーを適用することで動きを同期できることを覚えておきましょう!